Software Implementation
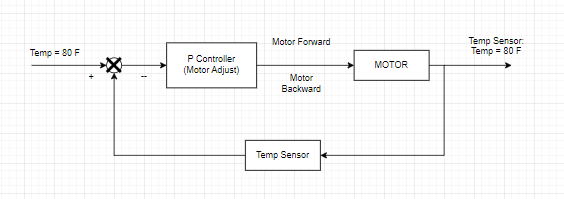
Block Diagram
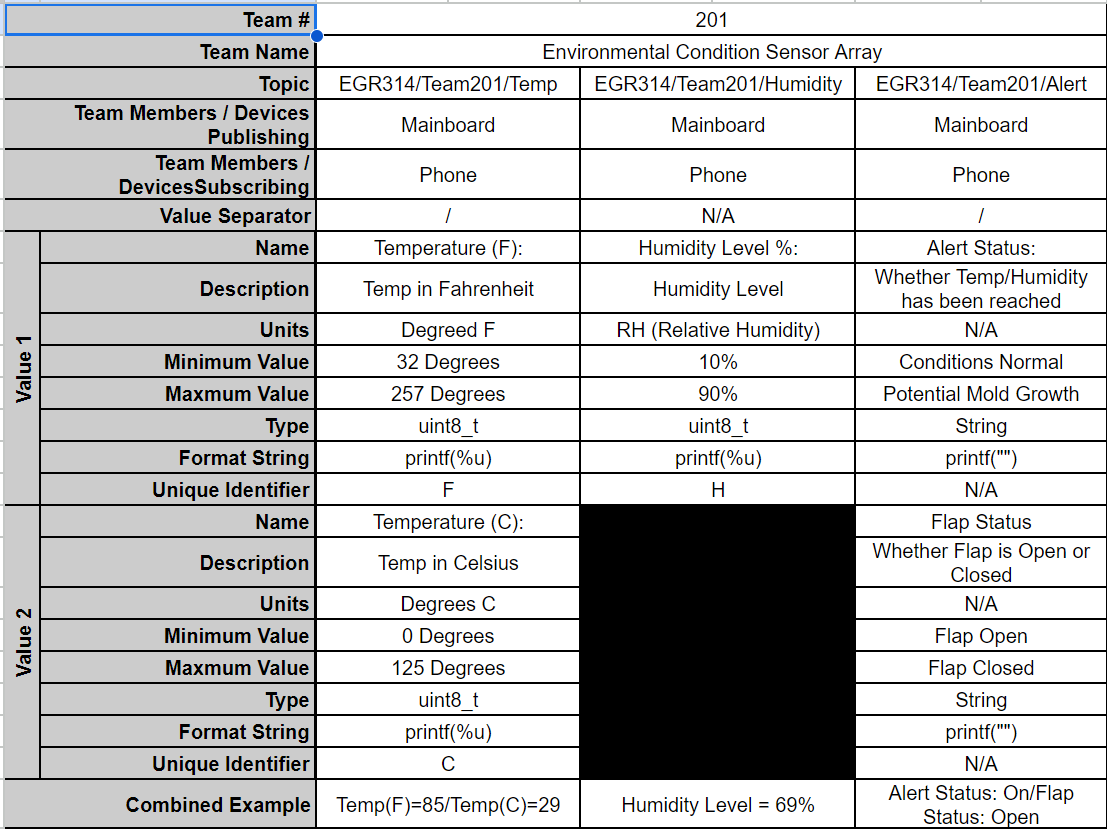
Topic Table
Software Diagram
Final Code
Our Final Code can be found below
#include "mcc_generated_files/mcc.h"
#include "mcc_generated_files/examples/i2c2_master_example.h"
#include <stdio.h>
#include <stdint.h>
#include <stdbool.h>
#define address 0x4C //Temp Address
#define HumAddress 0x27 //Humidity Address
#define HUMIDITYCONVERSION 70.57 //conversion factor for humidity values read from sensor
void RxReceive(void){ //Interrupt
EUSART1_Receive_ISR(); //If Message is sent to ESP32
for(int i = 0; i <= 5; i++){ //Flash it 5 Times
LEDG_Toggle();
__delay_ms(100);
}
LEDG_SetLow();
}
void main(void)
{
//Initializations
SYSTEM_Initialize();
I2C2_Initialize();
EUSART1_Initialize();
SPI1_Initialize();
//Variables
uint8_t temperature;
uint8_t humidity;
uint8_t dbuff[4];
uint16_t conversion = 0;
uint8_t dir1 = 0b11001111;
uint8_t dir2 = 0b11111101;
uint8_t stop = 0b11000000;
uint8_t receive;
double HumidityPer = 0; //Initialize Humidity
SPI1_Open(SPI1_DEFAULT); //Open SPI
//Interrupts
INTERRUPT_GlobalInterruptEnable(); //
INTERRUPT_PeripheralInterruptEnable();
EUSART1_SetRxInterruptHandler(RxReceive);
while(1)
{
temperature = I2C2_Read1ByteRegister(address, 0x00); //Read Temp
float temperatureF = ((temperature*1.8) + 32); //Convert to F
I2C2_ReadNBytes(0x27, dbuff, 1); //Read Humidity
__delay_ms(38);
I2C2_ReadNBytes(0x27, dbuff, 4);
conversion = (dbuff[0] << 8 | dbuff[1]) & 0x3fff; //Convert Humidity
__delay_ms(1000);
HumidityPer = (((float)conversion / (16382)) * HUMIDITYCONVERSION); //Convert To Percentage
//Normal Mode Where LED Is ON
if ((temperatureF <= 80 ) && (HumidityPer <= 55))
{
LEDR_SetLow();
LEDG_SetHigh();
LEDB_SetLow();
__delay_ms(50);
}
//"Bad Mode" Where Conditions are not Ideal. Motor Will Activate
else while (((temperatureF >= 80) || (HumidityPer >= 55)) && Button_GetValue() == 0)
{
LEDG_SetLow();
LEDR_SetHigh();
SS_pin_SetLow();
__delay_ms(1000);
SPI1_WriteByte(dir1);
__delay_ms(500);
SS_pin_SetHigh();
__delay_ms(5000);
SS_pin_SetLow();
__delay_ms(1000);
SPI1_WriteByte(stop);
__delay_ms(500);
SS_pin_SetHigh();
while(Button_GetValue() == 0){
LEDR_SetHigh();
__delay_ms(50);
LEDR_SetLow();
__delay_ms(50);
printf("Humidity = %2.2f \r \n", HumidityPer);
printf("TempF = %3.0f \r \n", temperatureF);
}
}
printf("Humidity = %2.2f \r \n", HumidityPer);
printf("TempF = %3.0f \r \n", temperatureF);
SPI1_WriteByte(stop);
__delay_ms(1000);
// Reset Where Button Is Pressed
while (Button_GetValue() == 1)
{
LEDR_SetLow();
LEDG_SetHigh();
__delay_ms(500);
LEDG_SetLow();
SS_pin_SetLow();
__delay_ms(1000);
SPI1_WriteByte(dir2);
__delay_ms(500);
SS_pin_SetHigh();
}
//Stop the Motor and Restart Code
SS_pin_SetLow();
__delay_ms(1000);
SPI1_WriteByte(stop);
__delay_ms(500);
SS_pin_SetHigh();
}
}
Proportional Controller